
OBD2 Telematics with GPS-to-CAN (Road Analysis)
Case Studies / Gustave Eiffel University
Gustave Eiffel University
GEU is a public research institution and conducts research in the fields of transport, infrastructure, natural hazards and urban issues
What problem did you solve?
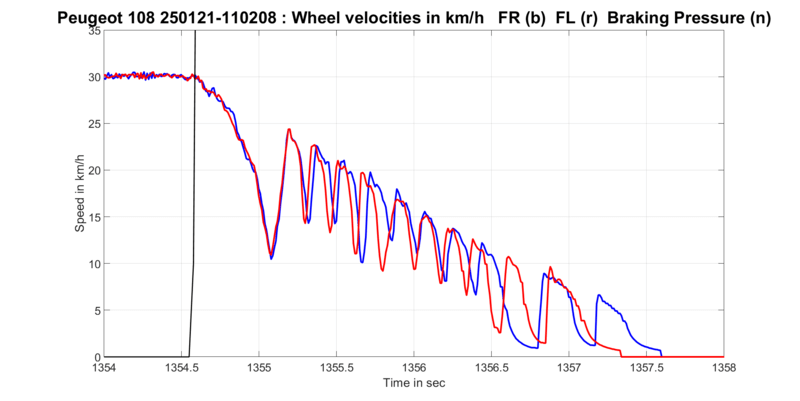
We recorded CAN and OBD2 data on road vehicles (e.g. the Peugeot 108), mainly for a project aiming at the determination of 'low grip areas' during winter in the rural and middle mountainous part of France (Doubs). The vehicle belongs to local road authorities and performs night patrols, during which ABS braking and slipping occurs. The objective is to help prioritize the areas to be salted.
How did you solve it?
We did not have insight into vehicle's proprietary CAN data, so we initially performed a CAN bus reverse engineering step to decode the relevant CAN signals. We began this work three years ago with the CLX000 CAN loggers which record data in a CSV-style format. During this time, we used custom MATLAB scripts to decode and analyze the CAN data. Later on, we moved to the CANedge2 and initially used the 'mdf2clx000' MF4 converter, which transformed the CANedge2 log files into the CLX000 format (to enable us to continue using our existing MATLAB scripts).
 Typical front wheel velocities during ABS braking on a slippery road (data recorded with the CANedge2).
Typical front wheel velocities during ABS braking on a slippery road (data recorded with the CANedge2).
More recently, we also started using the GPS-to-CAN module (CANmod.gps) from CSS Electronics. This module comes with a ready-to-use CAN database (DBC file) and we therefore began to use the asammdf GUI software to decode and analyze our data.
Currently, we are starting to use the CSS Electronics Python API with the purpose of solving two analysis challenges:
"The performance/cost ratio, support and open source tools are outstanding!"
First, we need to provide feedback to the patrol vehicle driver quickly after he performs a trial. To achieve this, we need a fully automated process - from SD logging, WiFi transfer, DBC decoding, analysis and then to transferring the relevant information about the grip to the driver. As our study takes place in a rural area, the quality of the 3G/4G network is a potential challenge.
Second, we need to build a database of 'low grip areas', essentially merging data accumulated during several winters on the road network, which the road authorities can use for their winter service policy. For this part, no "real time" data is needed, but instead a more detailed post-processing and analysis process should be performed.
What benefit has this led to?
For decades, we have been developing heavily instrumented vehicles for our research into vehicle dynamics. However, an evolution towards using built-in sensors and CAN data was mandatory - and the CSS CAN bus data logger was an asset in this approach. We are also just beginning to take advantage of the CANmod.gps, which complements the CANedge2 perfectly.
Why did you choose the CANedge/CANmod?
Mainly due to the good performance/cost ratio, as well as the efficiency of the CSS support.
— Daniel Lechner , Director of Research, Gustave Eiffel University
Ready to log your OBD2/CAN data?
Get your OBD2/CAN logger today!


